Things to consider:
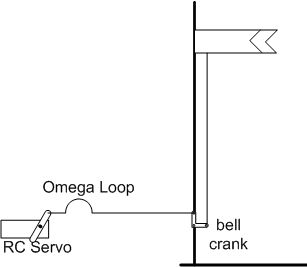
- Even the smallest servos are very powerful. Use an "omega loop" between the servo and your model so that excess movement does no damage.
- They can consume a lot of power when moving: 200mA is common. You may well want an external power feed when using servos. CV26 allows servos to be operated sequentially, s that only one moves and is powered at a time: when CV26=0 this is the case.
- Use the "power off when finished moving" settings (CV60, 67, 74, 81). Set this to a small value so that once the servo has reached its destination, power is removed. Experiment to find sensible values but 30 is a good starting point.
- You will need to experiment to find sensible values for the start and end position and speed settings. We recommend that you don't connect the servo operating arm to your model until you've got this adjusted correctly.
Servos have a 3 wire connection. You will need to check the order of those wires. The MSC8 is wired for most RC servos in common use... but there will always be one to catch you out. Our connector has the 3 wires in the order Ground, +5v, control signal. Ground is closest to the board edge. Check with the servo manufacturer!